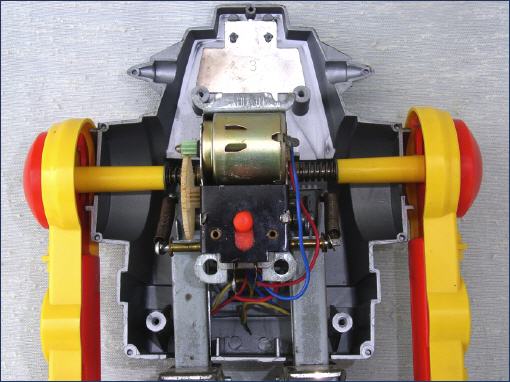
Karate Robot von Tomy 1970
Blick auf Motor und Mechanik
Blechspielzeug-Roboter faszinieren schon allein durch ihre bunten, fantasievollen Lithographien. Den eigentlichen Reiz erhalten die Roboter aber durch ihre Mechanik, die für immer neue, überraschende Bewegungen sorgt. Den dafür notwendigen Antrieb gab es in vielen Varianten. Der Einfallsreichtum der Hersteller nutzte fast alle Möglichkeiten der Technik.
Die ersten Spielzeugroboter in den vierziger Jahren des vorigen Jahrhunderts waren, wie die meisten Blechspielzeuge seinerzeit, mit Uhrwerkantrieb ausgestattet. Dabei wird eine Blattfeder durch Drehen mit einem Uhrwerkschlüssel gespannt. Wird dann ein Sperrmechanismus entriegelt, kann die Feder sich langsam entspannen und die frei werdende Kraft treibt Zahnräder und Gestänge an. Der Nachteil waren die recht kurzen Laufzeiten. Das Kind mußte sein Spielzeug immer wieder in die Hand nehmen, um das Uhrwerk aufzuziehen. Immerhin gab es Spielzeugroboter mit Uhrwerk bis in die achtziger Jahre hinein.
Wieviel praktischer war da ein anderer Antrieb. Schon in der Zeit vor dem zweiten Weltkrieg gab es Spielzeuge mit Batterieantrieb. Diese versorgten aber meist nur die Beleuchtung, bei Spielzeugautos und Eisenbahnen zum Beispiel. Das Problem waren damals die recht grossen Motoren, die zudem nicht sehr leistungsstark waren sowie die hohen Herstellungskosten. Seit den fünfziger Jahren bis heute gibt es Roboter mit Batterien. Neben diesen beiden häufigsten Antriebsarten gab es noch weitere.
Viele Blechspielzeuge nutzen den Friktionsantrieb. Schiebt man ein Blechauto mit Schwung an, bewegen die Räder über ein Getriebe im Inneren ein schweres Schwungrad aus Eisen. Seine rotierende Masse läßt das Fahrzeug noch ein Stück weit von selber fahren. Der "Atom Robot" von Yoshiya ist dafür ein Beispiel.
Dem Friktionsantrieb verwandt ist der Kurbelantrieb. Über eine kleine Kurbel an der Seite des Roboters kann man ein Schwungrad in seinem Inneren bewegen, welches dann den Roboter laufen läßt. Die japanische Firma Yoshiya verwirklichte dies beim "Robot Space Trooper" in den fünfziger Jahren.
"Robert the Robot" von der amerikanischen Firma Ideal 1954 auf den Markt gebracht, besaß einen Kurbelmechanismus. Der Roboter war über einen Bowdenzug mit einer Handschaltung mit Kurbel verbunden. Drehte man die Kurbel, begann Robert zu laufen. Zusätzlich konnte man die Arme bewegen, die Augen leuchteten und es gab eine Sprechfunktion. Ein legendäres Spielzeug. Ist Robert doch der erste amerikanische Spielzeug Roboter.
Der von der italienischen Firma Opset ab ca. 1948 hergestellte "Nando" Roboter besitzt einen pneumatischen Antrieb. Durch Druck auf einen kleinen Gummiball marschiert das 17cm große Kerlchen vorwärts.
Desweiteren gab es Roboter mit Antrieb durch Schwerkraft. Ein kleiner Hongkong Roboter aus den sechziger Jahren besitzt einen Solchen. Der 9cm große Roboter mit Wackelbeinen schiebt eine Schubkarre. Diese ist über eine Schnur mit einem Metallgewicht verbunden, daß man über die Tischkante hängen läßt. Das Gewicht geht nach unten und der Roboter läuft vorwärts. Eine andere Umsetzung dieser Antriebsart wurde 1953 als Gebrauchsmuster beim deutschen Patentamt angemeldet. Ein ca. 18cm großer Roboter aus Holz oder Kunststoff läuft mit seinen Wackelbeinen eine schräge Ebene hinunter. Bei jedem Schritt leuchtet seine Glühbirnen- Nase auf. Vermutlich gelangte dieser Roboter aber nicht in den Handel.
Euer Blechroboter
Zum Schluß vielleicht noch ein kleiner Tip: Auf Englisch heißt Batterieantrieb: Battery operated (BO), und Uhrwerkantrieb: Wind-up (WU)